-
-
上海浜田實(shí)業(yè)有限公司
Shanghai Hamada Industrial Co. , Ltd.
-
全國服務(wù)咨詢熱線:
13162861726
Shanghai Hamada Industrial Co. , Ltd.
13162861726


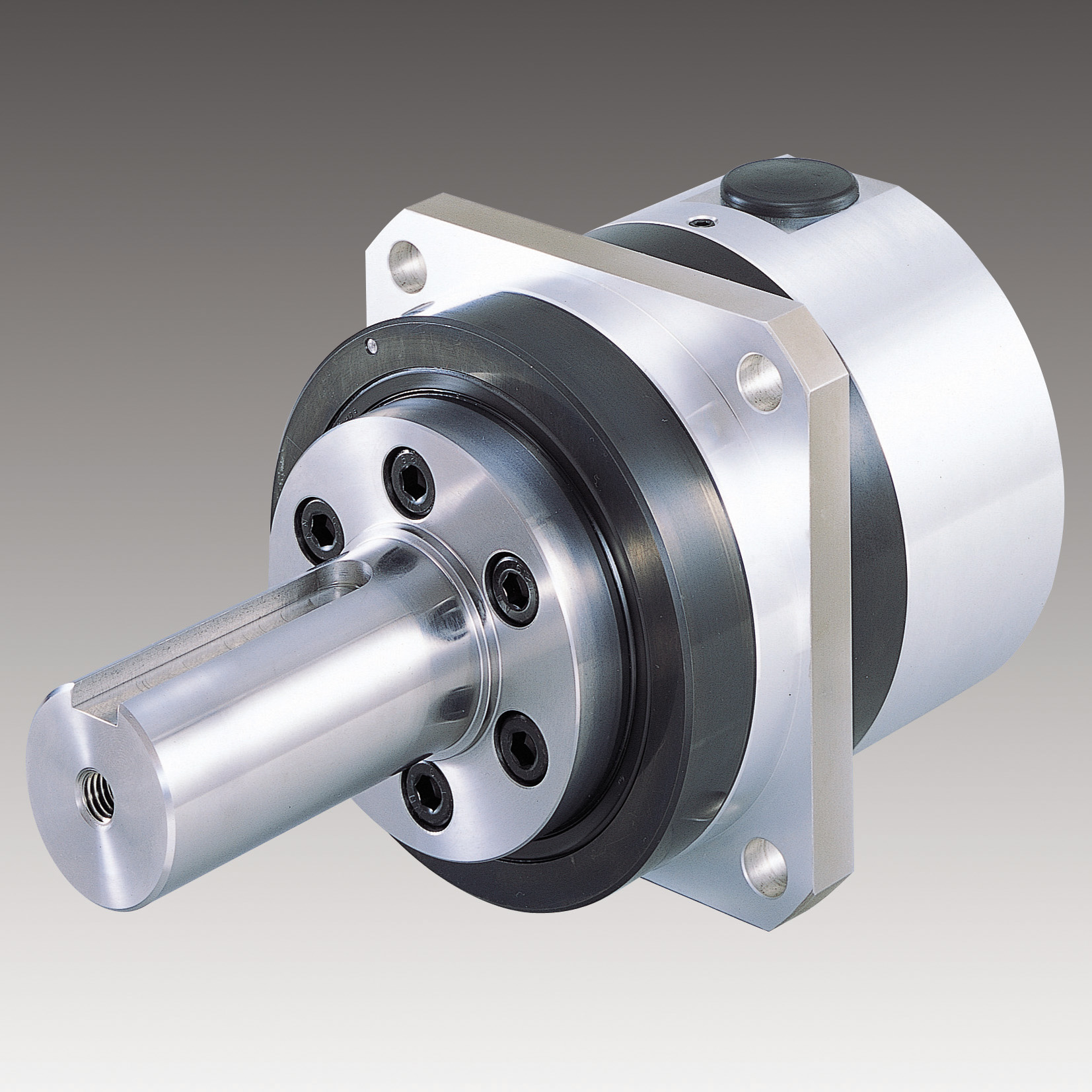

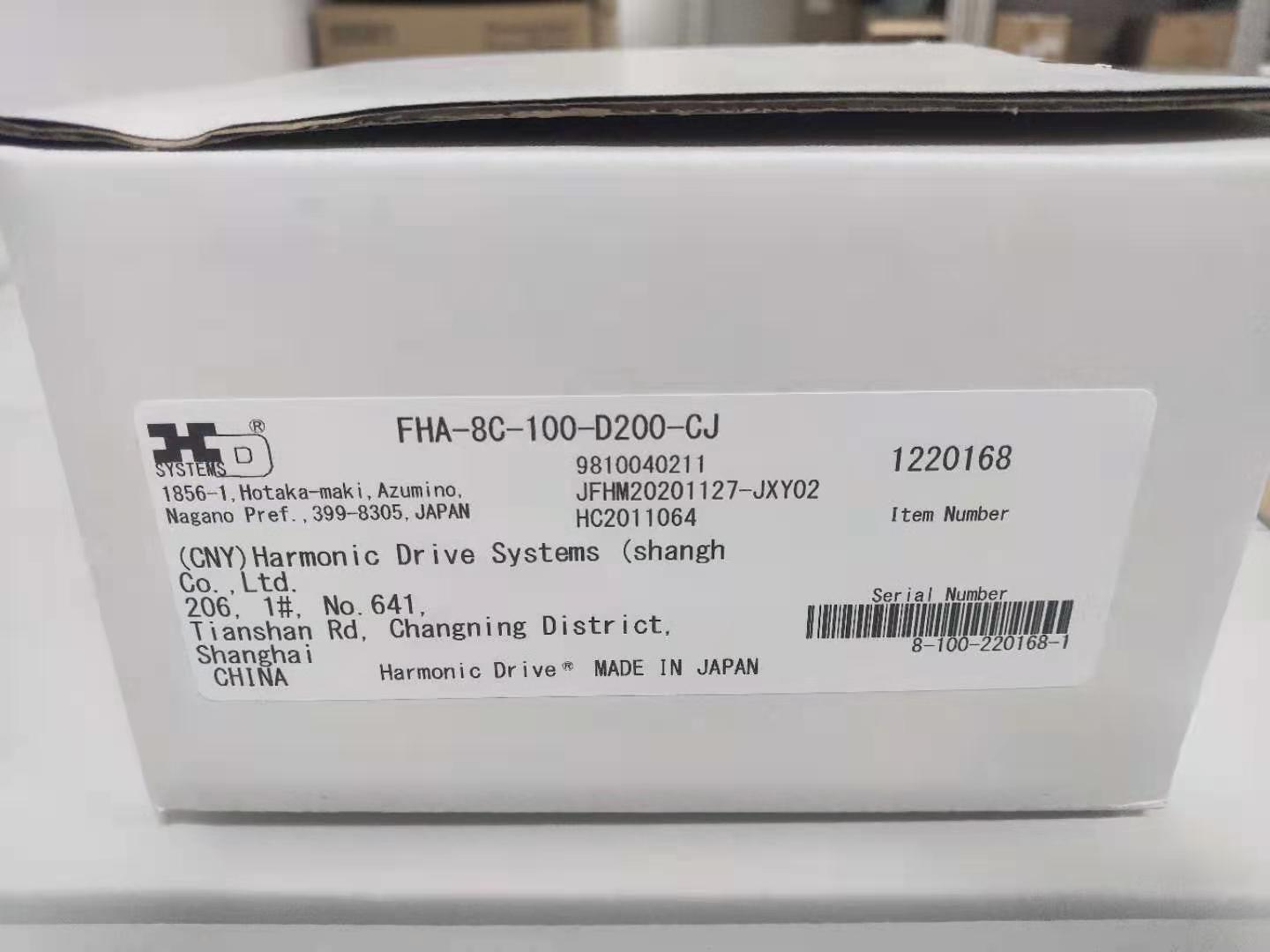
產(chǎn)品描述


您是第4642449位訪客
版權(quán)所有 ©2025-01-13 滬ICP備16037837號-5
上海浜田實(shí)業(yè)有限公司 保留所有權(quán)利.
手機(jī)網(wǎng)站

微信號碼
地址:上海市 嘉定區(qū) 江橋鎮(zhèn) 上海市嘉定區(qū)愛特路877號商務(wù)園D棟510室
聯(lián)系人:張俊杰先生(銷售部經(jīng)理)
微信帳號:13162861726
SHD系列 諧波減速機(jī)")
CSG系列")
應(yīng)用諧波模組SHG-65-120-2SH")
械磨削諧波SHG-17-120-2SH")
